
近日,东南大学网络空间安全学院副研究员公鑫的研究成果被《IEEE Transactions on Automation Science and Engineering》(IEEE T-ASE)录用(附论文链接https://ieeexplore.ieee.org/abstract/document/10539947)。论文的第一作者为公鑫副研究员(东南大学),通讯作者为杨雪飞副教授(哈尔滨工业大学)。该工作是一个成功的校际合作项目,得到了虞文武教授团队和桂杰教授团队(东南大学)、段广仁院士团队(哈尔滨工业大学/南方科技大学)、陈勇老师团队(中南大学)和黄廷文教授团队(美国德克萨斯州立大学/深圳理工大学)充分的理论和技术支持,在此谨代表我方对各方努力表示感谢。
论文题目为“Resilient Human-in-the-Loop Formation-Tracking of Multi-UAV Systems Against Byzantine Attacks”。该论文针对多无人机系统在拜占庭攻击下的弹性人在环编队跟踪问题提出了一种创新的解决方案。拜占庭攻击是指部分未知的机器人个体成为攻击者操纵的傀儡,这些傀儡不仅向邻居机器人传播不同的欺骗性信息,还会在控制过程中采取极端的输入信号。为应对这一挑战,论文提出了一种由虚拟数字孪生层(DTL)和网络物理层(CPL)组成的拜占庭弹性分层控制方案(如图1所示)。该控制方案在DTL上提出了分布式弹性估计方案,在DTL拓扑结构强稳健的前提下,实现了对人在环控制下的领航无人机状态的弹性估计,从而抵御拜占庭边攻击(BEAs)。进一步地,该控制方案在CPL上制定了一系列分散且无颤振的控制器,这些控制器对拜占庭点攻击(BNAs)和层间故障都具有足够的弹性和鲁棒性。论文对提出的分层控制方案进行了严格的理论分析,并且通过弹性人在环多无人机系统实验验证了其在实际应用中的有效性与实用性(附实验视频链接https://www.bilibili.com/video/BV1C1421R7Rv/)。实验结果证明,该方案在复杂和动态环境下能显著提升无人机系统的编队跟踪任务的弹性和鲁棒性。
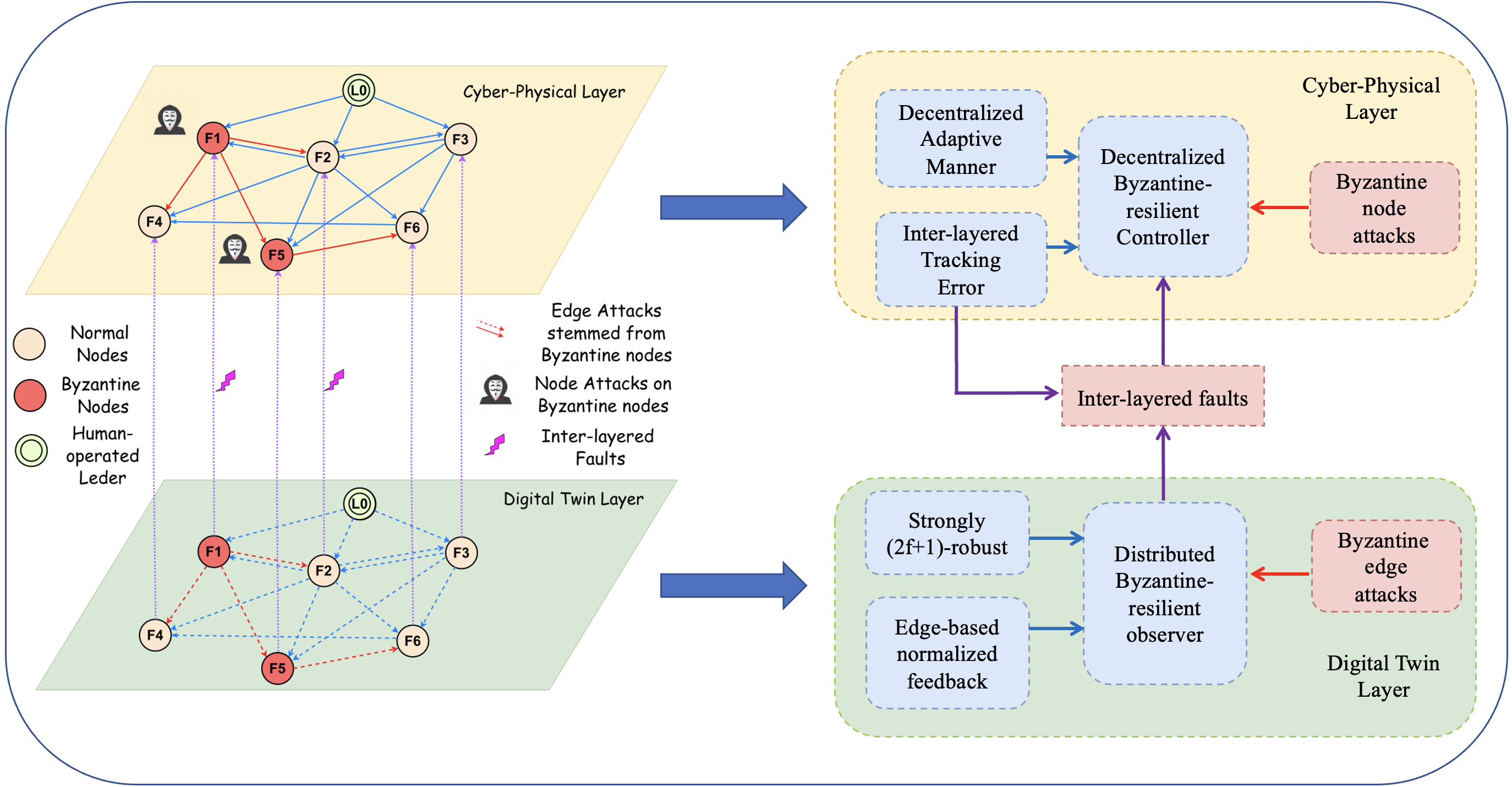
图1 针对拜占庭攻击的双层框架流程图,其中DTL用于抵御BEAs,而CPL针对BNAs及跨层故障进行防御。
IEEE T-ASE是自动化科学与工程领域的知名SCI期刊之一,被广泛认可为与IEEE T-RO、IEEE T-AC等齐名的自动化领域的顶级期刊。IEEE T-ASE是中国院一区Top期刊和中国自动化学会推荐期刊之一,近3年录用率低于10%,具有很高的学术影响力,代表着当前控制工程领域最前沿的研究水平。
